$J$ Sweep
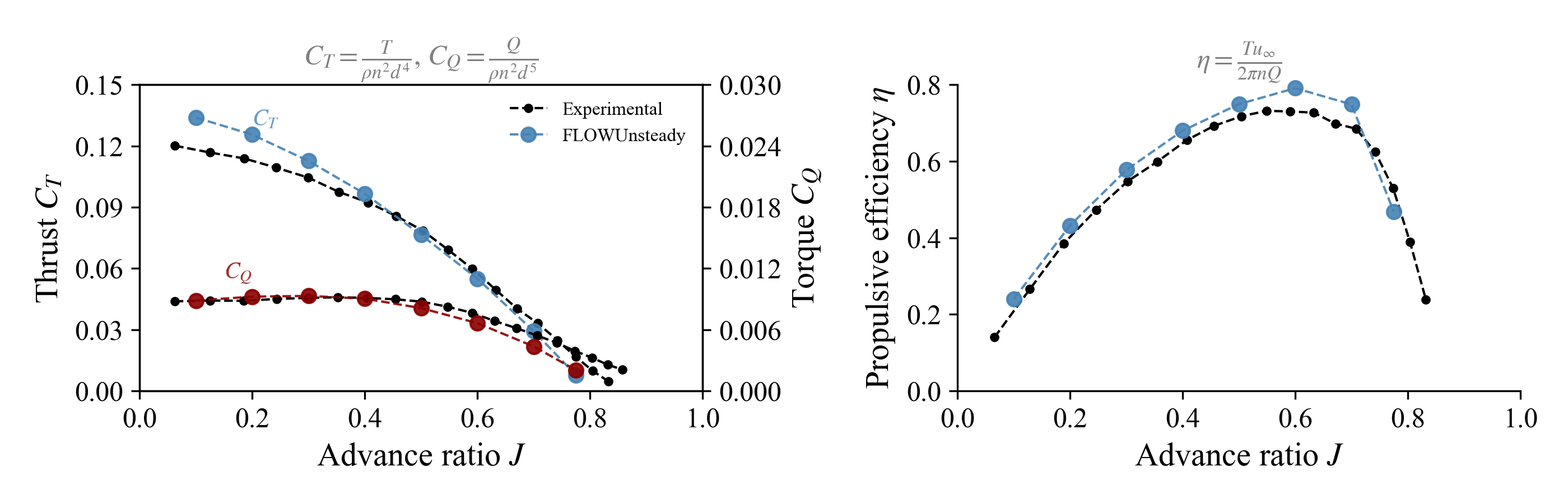
Using the same rotor from the previous section, we now run a sweep of the advance ratio $J = \frac{u_\infty}{n d}$ to characterize the performance of the propeller.
#=##############################################################################
# DESCRIPTION
Advance ratio sweep on APC 10 x7 propeller
=###############################################################################
case_name = "propeller-Jsweep-example"# Name of this sweep case
save_path = case_name # Where to save this sweep
Js = [0.1, 0.2, 0.3, 0.4, 0.5, 0.6, 0.7, 0.775] # Advance ratios Vinf/(nD)
# Create path where to save sweep
uns.gt.create_path(save_path, true)
# ----------------- J SWEEP ----------------------------------------------------
for J in Js
println("\n\n Running J = $(J)")
magVinf = J*RPM/60*(2*R)
Vinf(X, t) = magVinf*[cosd(AOA), sind(AOA), 0] # (m/s) freestream velocity vector
# ------------- 1) VEHICLE DEFINITION ---------
println("\tGenerating geometry...")
# Generate rotor
rotor = uns.generate_rotor(rotor_file; pitch=pitch,
n=n, CW=CW, blade_r=r,
altReD=[RPM, J, mu/rho],
xfoil=xfoil,
ncrit=ncrit,
data_path=data_path,
verbose=false,
verbose_xfoil=false,
plot_disc=false
);
# Generate vehicle
system = vlm.WingSystem() # System of all FLOWVLM objects
vlm.addwing(system, "Rotor", rotor)
rotors = [rotor]; # Defining this rotor as its own system
rotor_systems = (rotors, ); # All systems of rotors
wake_system = vlm.WingSystem() # System that will shed a VPM wake
# NOTE: Do NOT include rotor when using the quasi-steady solver
if VehicleType != uns.QVLMVehicle
vlm.addwing(wake_system, "Rotor", rotor)
end
vehicle = VehicleType( system;
rotor_systems=rotor_systems,
wake_system=wake_system
);
# ------------- 2) MANEUVER DEFINITION --------
# No changes
# ------------- 3) SIMULATION DEFINITION ------
simulation = uns.Simulation(vehicle, maneuver, Vref, RPMref, ttot;
Vinit=Vinit, Winit=Winit);
# ------------- 4) MONITOR DEFINITION ---------
monitor_rotor = uns.generate_monitor_rotors(rotors, J, rho, RPM, nsteps;
t_scale=RPM/60,
t_lbl="Revolutions",
save_path=save_path,
run_name="J$(ceil(Int, J*100))",
disp_conv=false,
figname="rotor monitor J=$(J)",
)
# ------------- 5) RUN SIMULATION -------------
println("\tRunning simulation...")
uns.run_simulation(simulation, nsteps;
# ----- SIMULATION OPTIONS -------------
Vinf=Vinf,
rho=rho, mu=mu, sound_spd=speedofsound,
# ----- SOLVERS OPTIONS ----------------
p_per_step=p_per_step,
max_particles=max_particles,
vpm_viscous=vpm_viscous,
sigma_vlm_surf=sigma_rotor_surf,
sigma_rotor_surf=sigma_rotor_surf,
sigma_vpm_overwrite=sigma_vpm_overwrite,
vlm_rlx=vlm_rlx,
shed_unsteady=shed_unsteady,
shed_starting=shed_starting,
extra_runtime_function=monitor_rotor,
# ----- OUTPUT OPTIONS ------------------
save_path=nothing,
v_lvl=1, verbose_nsteps=24
);
end
Check examples/propeller/propeller_jsweep.jl to postprocess and plot the results as shown below.