AOA Sweep
Using the same vehicle, maneuver, and simulation defined in the previous section, we now run a sweep of the angle of attack.
#=##############################################################################
# DESCRIPTION
AOA sweep on 45° swept-back wing
=###############################################################################
import FLOWUnsteady: cross, dot, norm, plt, @L_str
AOAs = [0, 2.1, 4.2, 6.3, 8.4, 10.5, 12] # (deg) angles of attack
Xac = [0.25*b/ar, 0, 0] # (m) aerodynamic center for moment calculation
# Results are stored in these arrays
CLs, CDs = [], [] # Lift and drag at each angle of attack
rolls, pitchs, yaws = [], [], [] # Rolling, pitching, and yawing moment
ls, ds = [], [] # Load and drag distributions
spanposs = [] # Spanwise positions for load distributions
# ----------------- AOA SWEEP --------------------------------------------------
for AOA in AOAs
println("\n\n Running AOA = $(AOA) deg")
# ------------- RUN SIMULATION ----------------
# Freestream function
Vinf(X, t) = magVinf*[cosd(AOA), 0.0, sind(AOA)]
# Define wing monitor with new reference freestream direction
Shat = [0, 1, 0] # Spanwise direction
Dhat = [cosd(AOA), 0.0, sind(AOA)] # Direction of drag
Lhat = cross(Dhat, Shat) # Direction of lift
# Generate wing monitor
monitor = uns.generate_monitor_wing(wing, Vinf, b, ar,
rho, qinf, nsteps;
calc_aerodynamicforce_fun=calc_aerodynamicforce_fun,
L_dir=Lhat,
D_dir=Dhat,
save_path=nothing,
disp_plot=false
)
# Run simulation
pfield = uns.run_simulation(simulation, nsteps;
# SIMULATION OPTIONS
Vinf=Vinf,
rho=rho,
# SOLVERS OPTIONS
p_per_step=p_per_step,
max_particles=max_particles,
sigma_vlm_solver=sigma_vlm_solver,
sigma_vlm_surf=sigma_vlm_surf,
sigma_rotor_surf=sigma_vlm_surf,
sigma_vpm_overwrite=sigma_vpm_overwrite,
shed_starting=shed_starting,
extra_runtime_function=monitor,
# OUTPUT OPTIONS
save_path=nothing,
v_lvl=1, verbose_nsteps=60
)
# ------------- POST-PROCESSING ---------------
# Integrate total lift and drag
L = sum(wing.sol["L"])
D = sum(wing.sol["D"])
# Lift and drag coefficients
CL = norm(L) / (qinf*b^2/ar)
CD = norm(D) / (qinf*b^2/ar)
# Control point of each element
Xs = [vlm.getControlPoint(wing, i) for i in 1:vlm.get_m(wing)]
# Force of each element
Fs = wing.sol["Ftot"]
# Integrate the total moment with respect to aerodynamic center
M = sum( cross(X - Xac, F) for (X, F) in zip(Xs, Fs) )
# Integrated moment decomposed into rolling, pitching, and yawing moments
lhat = Dhat # Rolling direction
mhat = Shat # Pitching direction
nhat = Lhat # Yawing direction
roll = dot(M, lhat)
pitch = dot(M, mhat)
yaw = dot(M, nhat)
# Sectional loading (in vector form) at each control point
fs = wing.sol["ftot"]
# Decompose vectors into lift and drag distribution
l = [ dot(f, Lhat) for f in fs ]
d = [ dot(f, Dhat) for f in fs ]
# Span position of each control point
spanpos = [ dot(X, Shat) / (b/2) for X in Xs ]
# Store results
push!(CLs, CL)
push!(CDs, CD)
push!(rolls, roll)
push!(pitchs, pitch)
push!(yaws, yaw)
push!(spanposs, spanpos)
push!(ls, l)
push!(ds, d)
end
Reduce resolution (n and steps) to speed up simulation without loss of accuracy.
Check examples/wing/wing_aoasweep.jl to see how to postprocess and plot the results as shown below.
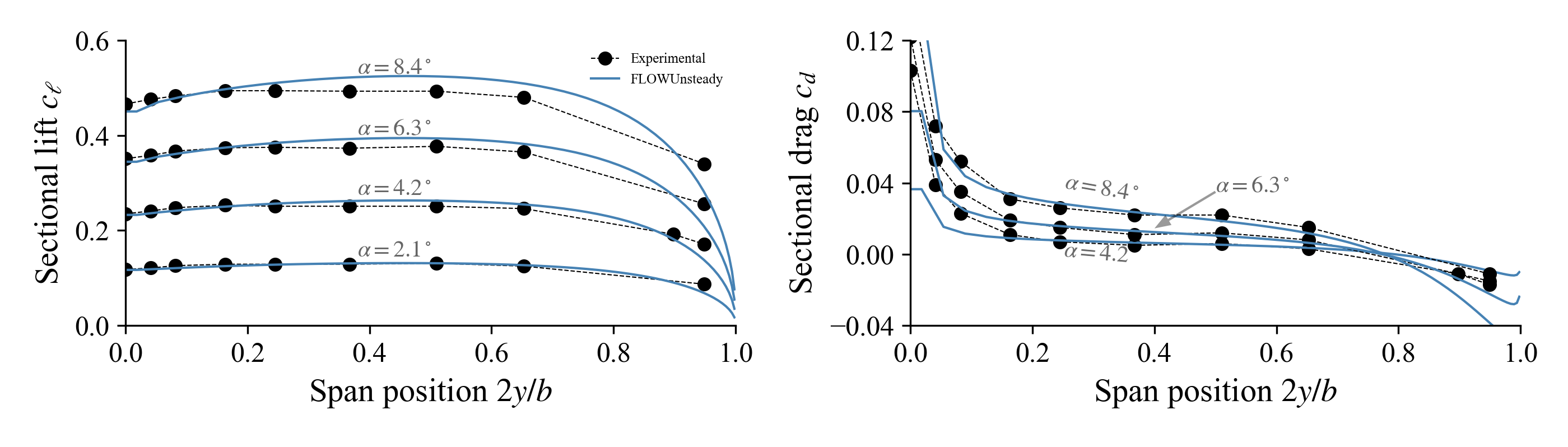
Spanwise loading distribution
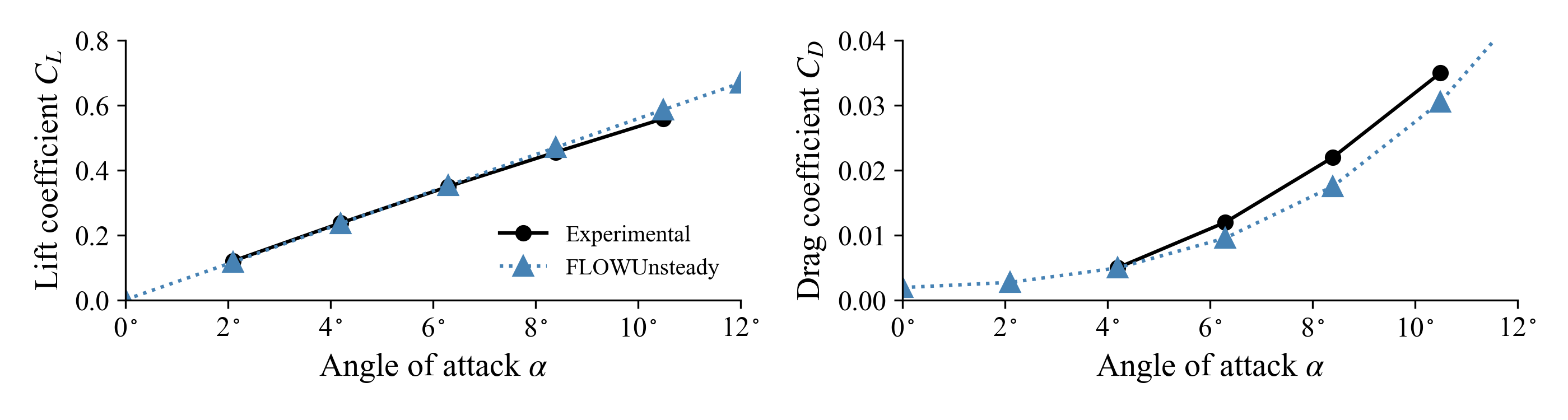
Vehicle lift and drag
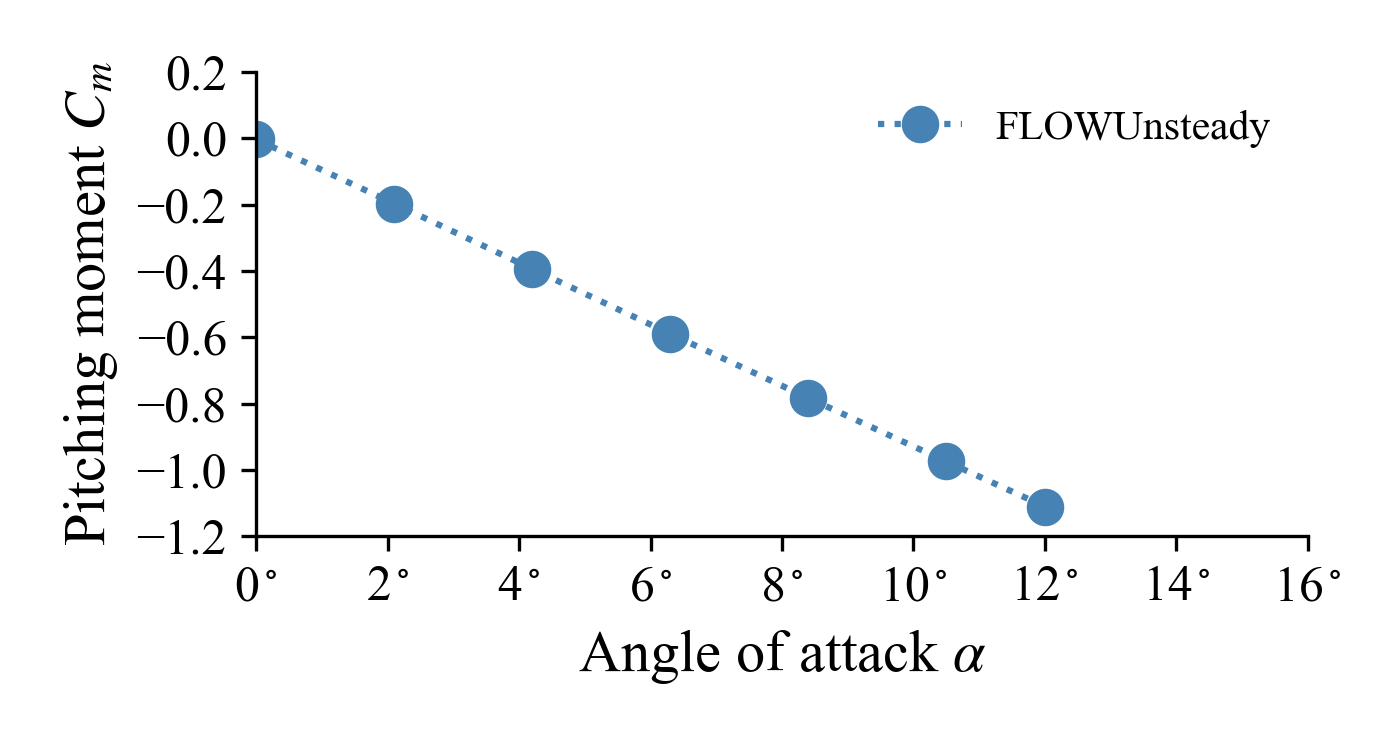
Pitching moment