(2) Maneuver Definition
FLOWUnsteady.KinematicManeuver — TypeKinematicManeuver{N, M}(angle, RPM, Vvehicle, anglevehicle)A vehicle maneuver that prescribes the kinematics of the vehicle through the functions Vvehicle and anglevehicle. Control inputs to each tilting and rotor systems are given by the collection of functions angle and RPM, respectively.
ARGUMENTS
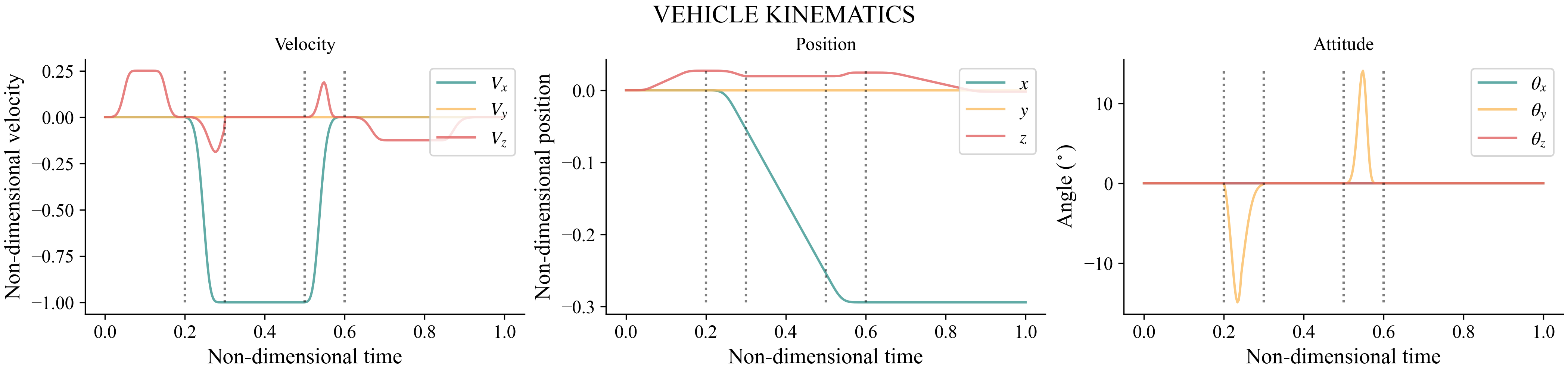
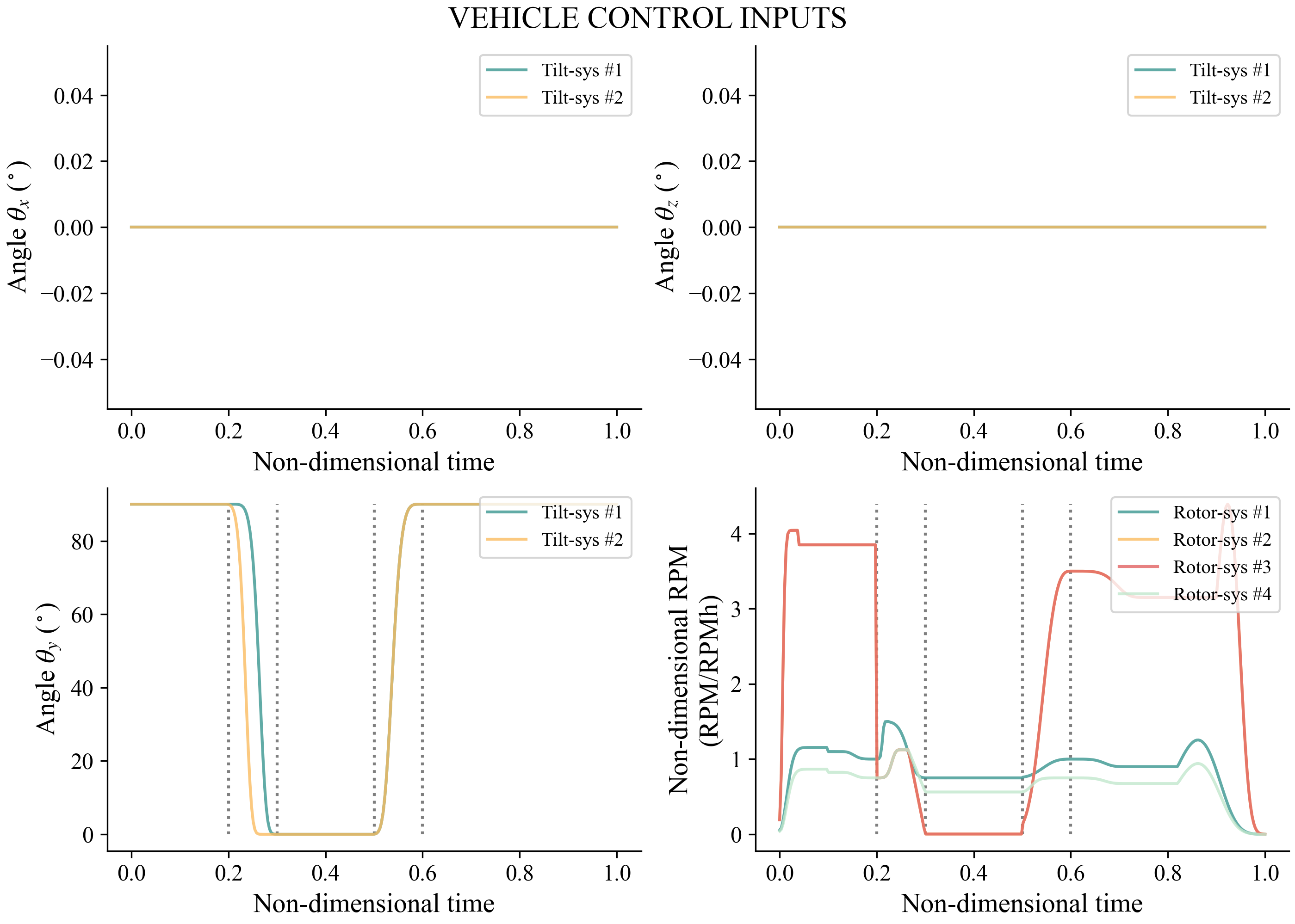
angle::NTuple{N, Function}whereangle[i](t)returns the angles[Ax, Ay, Az](in degrees) of the i-th tilting system at timet(t is nondimensionalized by the total time of the maneuver, from 0 to 1, beginning to end).RPM::NTuple{M, Function}whereRPM[i](t)returns the normalized RPM of the i-th rotor system at timet. These RPM values are normalized by an arbitrary RPM value (usually RPM in hover or cruise).Vvehicle::FunctionwhereVvehicle(t)returns the normalized vehicle velocity[Vx, Vy, Vz]at the normalized timet. The velocity is normalized by a reference velocity (typically, cruise velocity).anglevehicle::Functionwhereanglevehicle(t)returns the angles[Ax, Ay, Az](in degrees) of the vehicle relative to the global coordinate system at the normalized timet.
FLOWUnsteady.DynamicManeuver — TypeDynamicManeuver{N, M}(angle, RPM)A vehicle maneuver that automatically couples the kinematics of the vehicle with the forces and moments, resulting in a fully dynamic simulation. Control inputs to each tilting and rotor systems are given by the collection of functions angle and RPM, respectively.
NOTE: This methods has not been implemented yet, but it may be developed in future versions of FLOWunsteady.
FLOWUnsteady.plot_maneuver — Functionplot_maneuver(maneuver::KinematicManeuver; ti::Real=0, tf::Real=1,
vis_nsteps=300, figname="maneuver", tstages=[])Plots the kinematics and controls of a KinematicManeuver.
FLOWUnsteady.visualize_kinematics — Functionvisualize_kinematics(sim::Simulation, nsteps::Int, save_path::String)Steps the vehicle through the prescribed kinematics, outputting VTK files of the vehicle at every time step. Use this to visualize and debug a maneuver.
nsteps is the number of time steps in which to perform the maneuver. save_path is the path where to save the VTK files.